창고 로봇과 바코드 스캐닝: 자동화의 현실적인 접근
문제
물류 센터의 인력난이 심화되는 가운데, 로봇 자동화에 대한 관심이 높아지고 있습니다. 그러나 로봇이 물리적으로 이동하는 것만으로는 부족하며, 주변 환경을 인식하고 정확한 데이터를 캡처하는 능력이 핵심입니다.
솔루션
머신 비전과 바코드 스캐닝 기술을 AMR, AGV, 선반 로봇에 통합하면, 로봇이 자율적으로 재고를 스캔하고 위치를 파악하며 작업 우선순위를 판단할 수 있습니다.
기대 효과
- 재고 조사 시간 기존 대비 80% 단축
- 피킹 정확도 99.5% 이상 달성
- 인력 부족 환경에서도 24시간 운영 가능
물류 센터의 자동화는 더 이상 대기업만의 이야기가 아닙니다. 다양한 자동화 솔루션이 빠르게 보급되고 있으며, 이들의 핵심 역량은 바코드 인식 기술과의 결합에서 나옵니다.
물류 로봇의 유형과 역할
창고 자동화에 활용되는 로봇은 크게 세 가지로 나뉩니다.
AMR(Autonomous Mobile Robot): 별도의 인프라 설치 없이 자율적으로 창고를 이동하며 물품을 운반합니다. LiDAR와 카메라 센서로 주변 환경을 인식하면서 바코드를 스캔하여 물품의 위치와 수량을 실시간으로 파악합니다.
AGV(Automated Guided Vehicle): 정해진 경로를 따라 대량의 화물을 안정적으로 이동시킵니다.
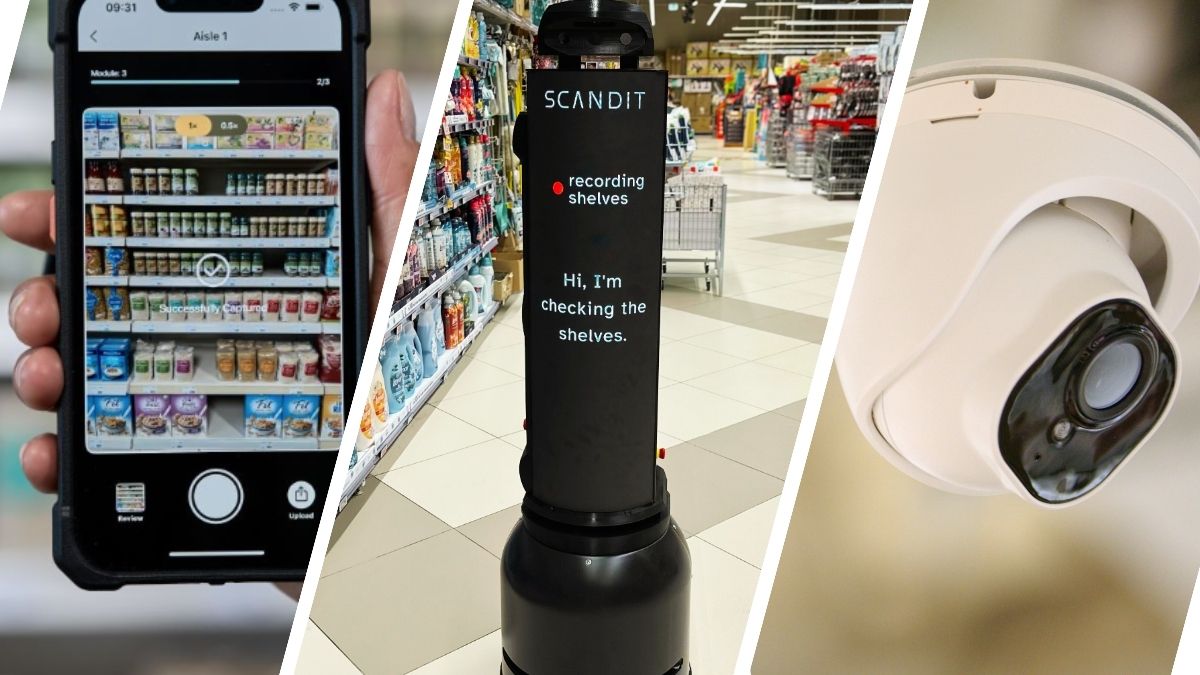
선반 스캐닝 로봇: 통로를 자율 주행하면서 선반 위의 모든 바코드를 카메라로 캡처하여 재고 현황을 자동으로 업데이트합니다. 특히 야간이나 휴일에 무인으로 재고 조사를 수행할 수 있어, 영업 시간에 영향을 주지 않으면서 재고 정확도를 유지할 수 있습니다.
머신 비전과 바코드 스캐닝의 결합
로봇의 눈 역할을 하는 것이 머신 비전 기술입니다. 단순히 바코드를 인식하는 것을 넘어 다양한 역할을 수행합니다:
- 상품의 위치 파악
- 올바른 제품인지 확인
- 파손 여부 감지
소프트웨어 기반 바코드 스캐닝 SDK를 로봇의 카메라 시스템에 통합하면, 한 번의 촬영으로 시야 내 모든 바코드를 동시에 인식하는 멀티스캔이 가능합니다. AR 오버레이 기술을 활용하면 로봇의 관제 화면에서 각 상품의 상태를 시각적으로 구분하여 표시할 수도 있습니다.
이러한 기술 통합은 로봇이 단순한 운반 장비에서 데이터를 수집하고 판단하는 지능형 장비로 진화하는 핵심 요소입니다.
사람과 로봇의 협업: 현실적인 자동화 전략
완전 무인 창고는 아직 대부분의 기업에게 현실적이지 않습니다. 가장 효과적인 접근은 로봇과 사람이 각자의 강점을 살리는 협업 모델입니다.
로봇이 담당하는 업무:
- 장거리 이동
- 반복적인 재고 스캔
- 야간 운영 등 체력과 일관성이 요구되는 작업
사람이 집중하는 업무:
- 파손 상품 처리
- 고객 요청 대응
- 복잡한 피킹 판단 등 유연한 사고가 필요한 작업
이때 사람과 로봇이 동일한 바코드 스캐닝 소프트웨어를 사용하면, 스마트폰으로 스캔한 데이터와 로봇이 수집한 데이터가 하나의 시스템에서 통합되어 관리됩니다. Data Connect는 SCANDIT의 SDK를 활용하여 로봇 시스템과 모바일 기기 모두에서 일관된 스캐닝 품질을 제공하는 통합 솔루션을 지원합니다.